
TOOLS
REALISTIC SET OF TOOLS WITH FORCE FEEDBACK.
COMBINE THE TOOL SET FOR SPECIFIC PROCEDURES. REALISTIC TOOL HANDLING.
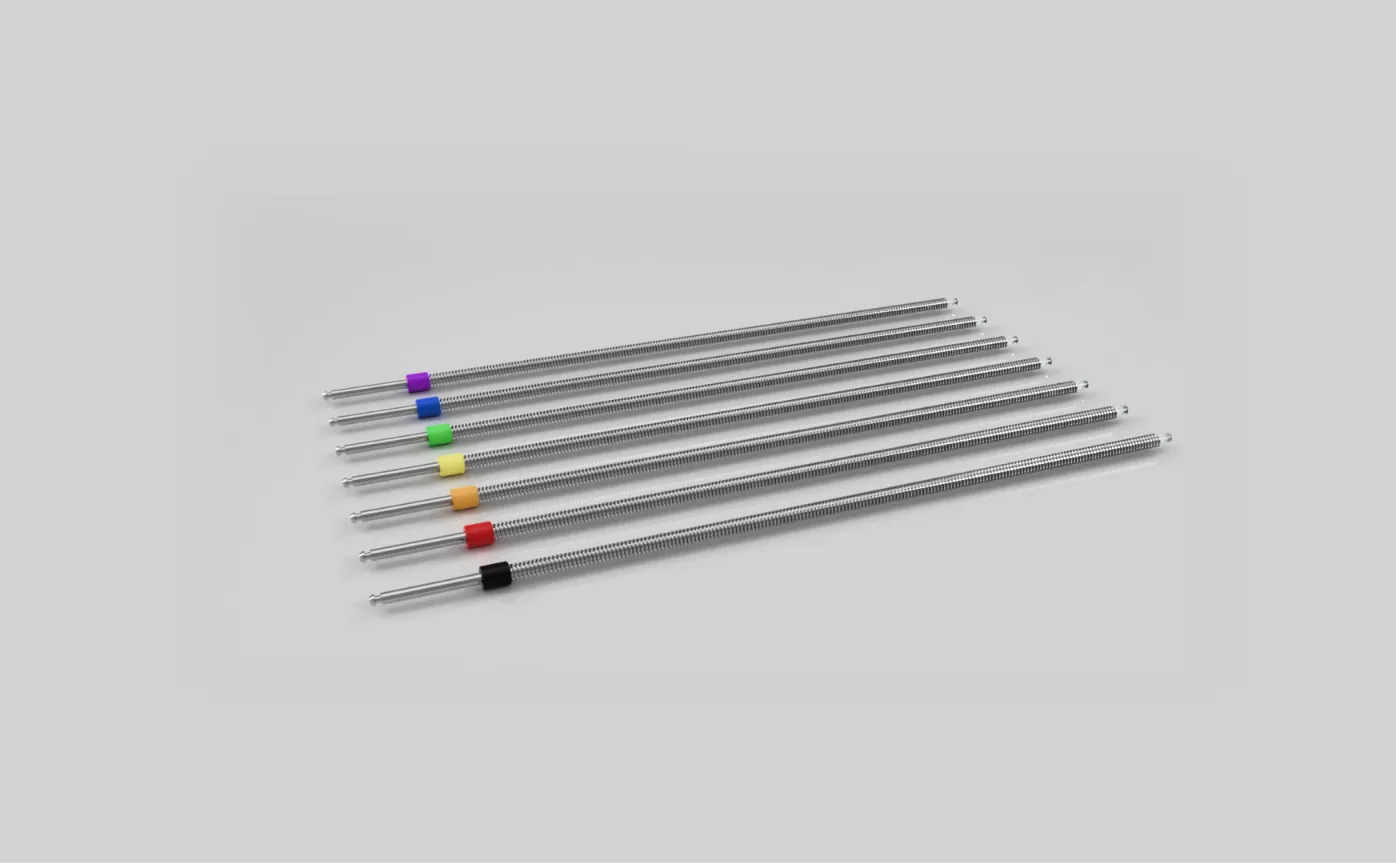
Shafts
The Shaft is the part that is inserted into a Port. It is threaded so that the Port can grab it lenght-wise,
and has grooves along its length so that the Port can grab it rotation-wise. The trainee does not need to consider the shaft orientation when introducing it into a Port.
The Shaft mates with any Handle via its quick connector. Just push and twist.
Each shaft has a tip that is identified by the Port upon insertion. There can be up to 20 individual shafts. The picture shows a standard set of 7 shafts, which is sufficient for most kinds of surgical procedures.
The black shaft is dedicated for the Scope, and the other colors for Handles that connect to the Ibox. Other colors can be used, typically for special purpose handles.
The shaft length is customizable, but the standard is 310mm for laparoscopy/thoracoscopy and 210mm for arthroscopy, exclusing the connector part.
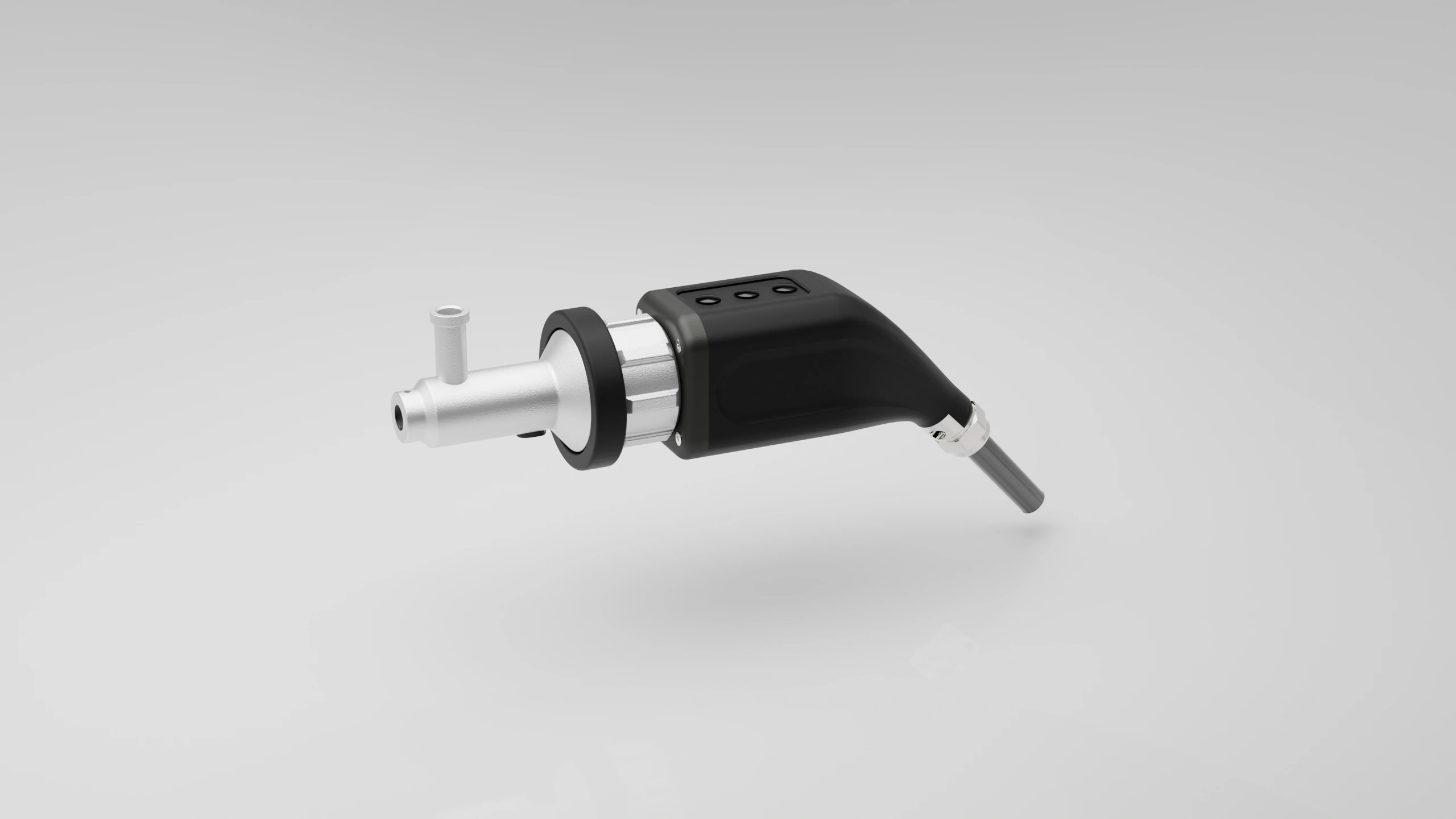
Scope
Scope The Scope represents a laparoscope + camera. It has a camera head with 3 generic pushbuttons and a zoom knob. The scope orientation relative to the camera is measured with a 360° absolute sensor. The scope head has a representation of the fiber light connector which tells the orientation of the scope optics. This allows training on angled scopes and horizoning. The Scope connects directly to USB (e.g. to a hub), and by default needs to mate with the black Shaft . Up to two Scopes can be used in a simulation (the second Scope should then mate with a white Shaft)

Grasper
The Grasper style handle represents e.g. a grasping forceps, a dissector, a scissor etc. It has a thumbgrip portion which the user manipulates. There are two versions of the Grasper; with or without force feedback. The Grasper with force feedback has a motor that provides forces to the thumbgrip so that the interaction with tissues is sensed. The output force is sensed and controlled by the Ibox.

Needle Driver
The Needle driver style handle represents a typical needle driver. It has a thumbgrip portion which the user manipulates, and which locks when closed. The lock is released with a button. Because of the way this instrument is typically used, the needle driver is without force feedback.

Clip Applier
The Clip applier style handle represents a generic clip applier. It has a handle portion to fire the clips, which the user manipulates. The clip applier has force feedback which can be used to program the resistance of the

Generic Straight
The Generic straight tool intends to represent any instrument that either has no additional interaction or interaction via one or two buttons, like a diathermy hook (which can be operated by a foot pedal or via buttons on the handle), a suction/irrigation instrument or an arthroscopic shaver.
CUSTOMIZATION
The tool handles and shaft can be customizes in many ways. The shafts can be cut to preferred lengths. The handles above can modified in many ways and new type of handles can be developed. We are able to fit sensors in existing real surgical instruments that have more complex handling, like staplers, clip appliers or special needle drivers.
ALL AVAILABLE NOW
Shop the tools for your setup.

Address
Ekvatorsvagen 8, 42338 Torslanda, Sweden
fredrik.olsson@follou.se
Follou AB All Rights Reserved
www.follou-haptics.com