
PRODUCTS AND KITS
Browse all available products with filters for your needs. You can also see premade kits.
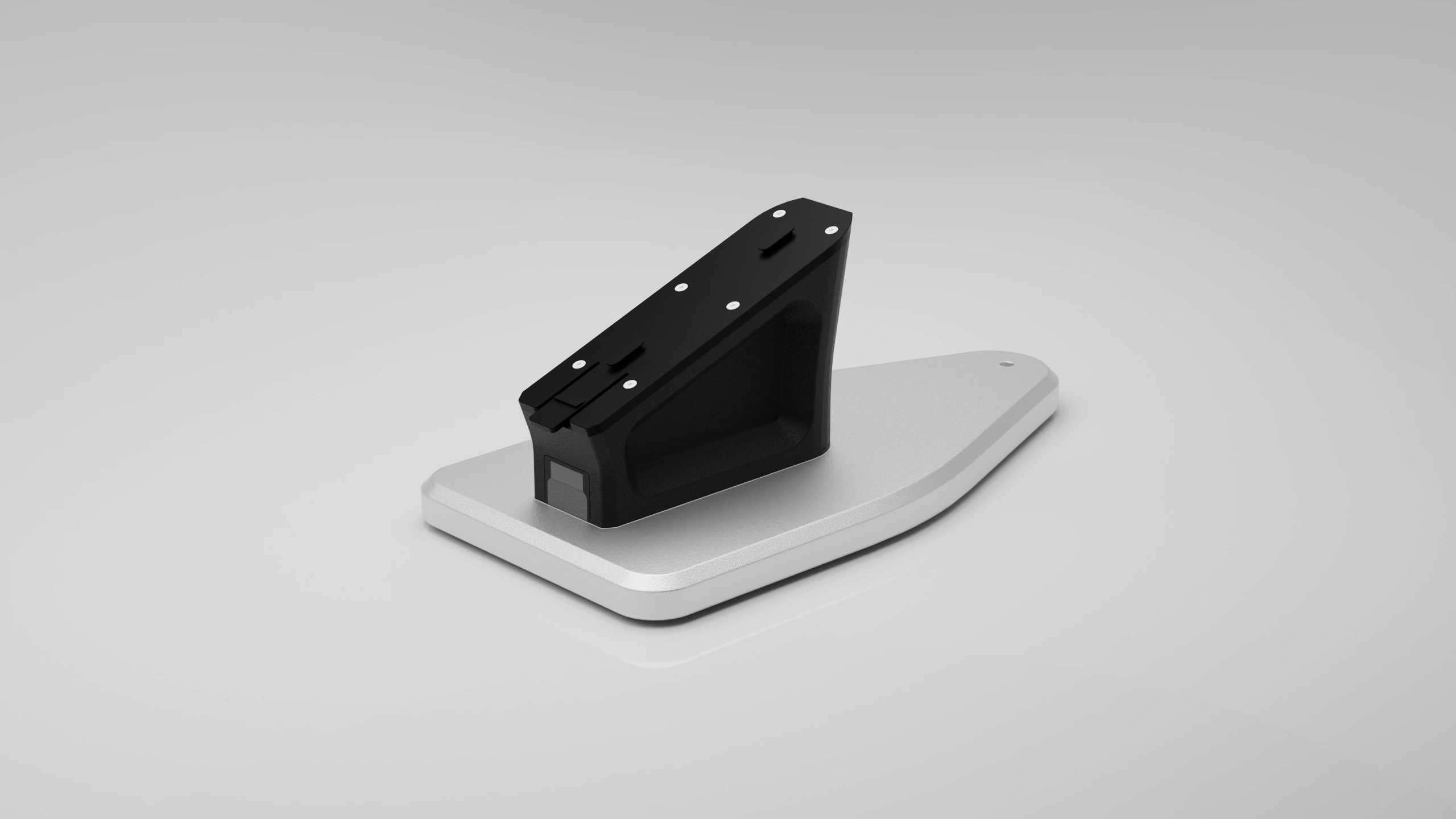
KIT AVATAR SINGLE
A kit for the Avatar system. This gives you an example of foundational components to get started with surgical training with one device.


And 1 More Item
SHOW KIT
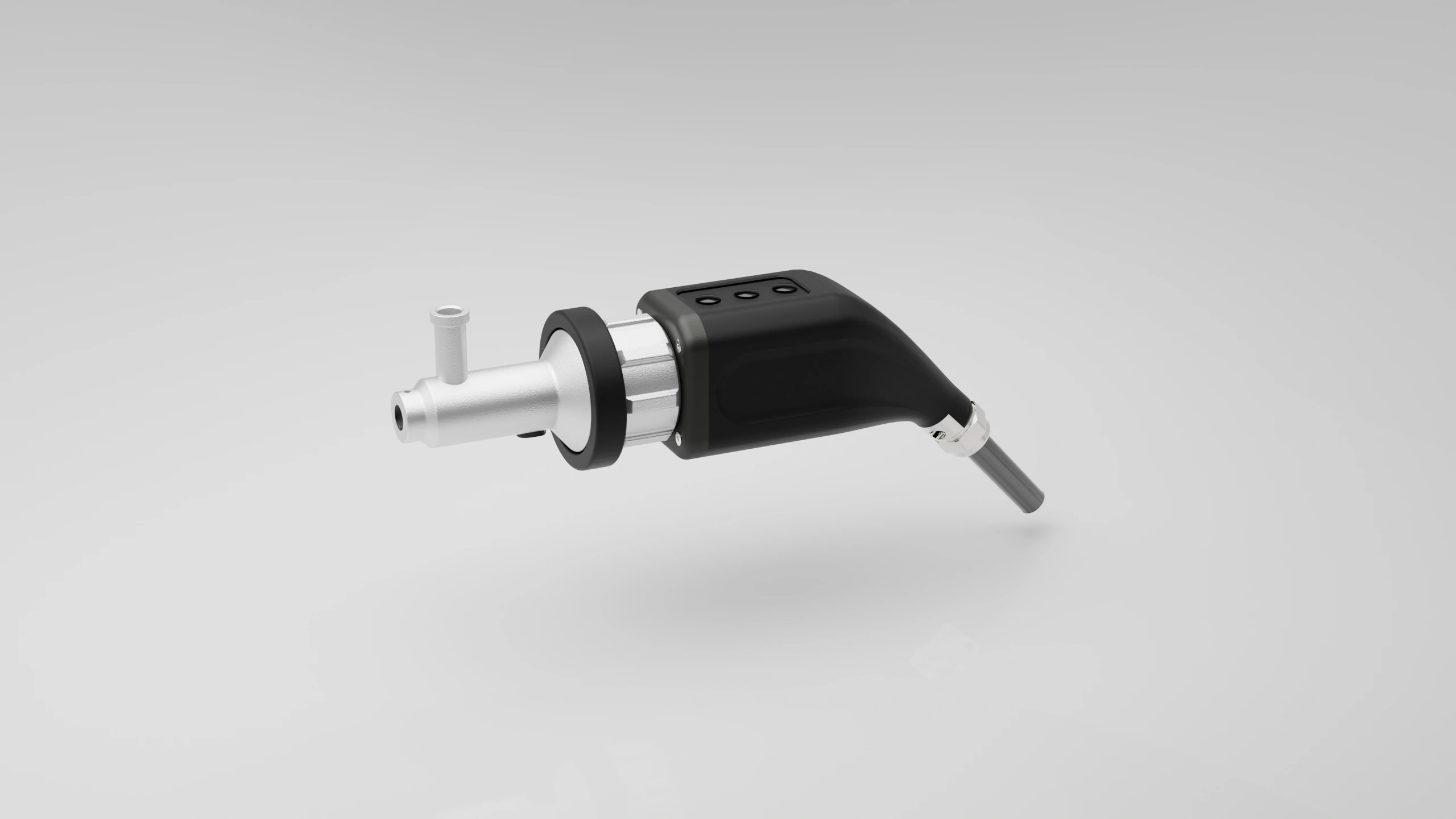
KIT AVATAR DUAL
A kit for the Avatar system. This gives you an example of foundational components to get started with surgical training with two devices.

And 1 More Item
SHOW KIT
All Products
Series
Type












Address
Ekvatorsvagen 8, 42338 Torslanda, Sweden
fredrik.olsson@follou.se
Follou AB All Rights Reserved
www.follou-haptics.com